Robot
+
Box filling system
+
Conveyor
+
Granulator
+
Dryer, Loader & Temp. Controller
+
Other equipment
+
EOAT
+
Clean Room Robot
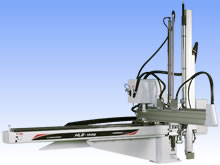
Pneumatic Traverse Robot HLIII Series
HLIII-150S/G(Servo Driven Traverse Axis)
Features
New HLIII robots have been released with advanced controllers.
Download
Specification
Model
HLIII-150S
HLIII-150G
Main arm vertical stroke
(mm)
800
Main gripper height
(mm)
120
Main arm kick stroke
(mm)
150
Sub arm vertical stroke
(mm)
-
850
Sub gripper height
(mm)
-
170
Sub arm kick stroke
(mm)
-
100
Max. distance between main arm and platen
(mm)
780
Min. distance between sub arm and platen (mm)
-
86
Traverse stroke (mm)
1400
Wrist flip angle(°)
90
Max. payload(kg)
3
Working air pressure (Mpa)
0.6
Air consumption(NL/cyc)
11.5
14.5
Drive system
Digital AC servo motor(Traverse) Air cylinder(Vertical/Kick)
Power supply(V)
Single phase 200VAC ±10% (50Hz / 60Hz)
Controller/Control system
HRS-500 / Stored program
Weight (kg)
211
*Max.payload:Including EOAT weight.
*Additional 63NL/min is consumed when vacuum ejector is used.
Controller
HRS-500
Compact hand-held controller.
Japanese,English,Chinese,Korean,and Thai versions available in standard.
EEPROM without necessity of memory backup battery.
Fifty mold memories.
User-programming (standard.max.42 steps)
Functions
Standard
A vacuum ejector circuit
A part gripper circuit
A main sprue grip circuit
Slow down at part release
In-mold/on-beam part and sprue release
Above-mold/on-beam wrist flip
Traverse-out/ Traverse-in sprue release
En-route wrist flip
Takeout from moveable and fixed molds
Home positions (above-mold, on-traverse beam)
Typical Option
Additional part grip circuits
Additional vacuum ejector circuits
Vacuum break ejector
TAH traverse end nipper with handwheel
TAM traverse end nipper with motor
Conveyor start signal
Box filling system start signal
Custom color
Traverse beam stanchion
Extended main arm strokes
Extended sub arm strokes
Extended kick strokes
Extended traverse strokes
EOAT nipper circuit
Multi-row placing